ML Principles
Last updated : 10 Oct 2025
ML Basics
-
ML is study of of algo that Improve on task T, wrt performance metric P, based on experience E
-
ML categories are
-
Classification
-
Generation
-
Novelty detection
-
-
ML Algorithms:
-
Nearest Neighbour
-
Naive Bayes
-
Decision Trees
-
Linear Regression
-
Support Vector Machines (SVM)
-
Neural Networks
-
-
Deep learning is specialised area within ML concerned with neural networks.
-
Types of learning in ML Systems :
-
Supervised :
Given Training Data + labels
Used when abundant labeled data -
Unsupervised :
Given training data without labels
goal is to discover hidden structures or patterns
Used when we want to explore structure in raw data
eg : clustering, dimensionality reduction (t-SNE or PCA), ICA -
Semi-supervised :
combines supervised and unsupervised
given training data + few labels
Used in common real world scenario where labelling is expensive or time consuming. -
Reinforcement :
Agent interacts with environment
Given seq of states & actions with rewards (delayed) & penalties
output a policy or mapping from states action that tells what to do in given state (maximize cumulative reward).
Used when learning is based on interaction and delayed rewards.
eg. playing super mario game:-
Rewards - collecting coins, defeating enemies, completing levels
-
Penalties - falling in pit, running out of time
-
-
Bayesian Decision Theory
-
Bayes Theory : Converts class prior P(wi) and class conditional densities p(x|wi) to posterior probablity for a class P(wi|x).
$P(w_i|x) = \frac{p(x|w_i)*P(w_i)}{p(x)} \qquad$
where,
posterior = (likelihood x prior) / evidence
Posterior probablity $P$ : updated belief after observing data
Prior probablity $p$ : belief before observing data -
Bayes Decision Theory : to minimize errors, chose the action/class that minimizes expected loss (i.e. Select lease risky class).
-
Decision function $\alpha(x)$ : Rule for making decision. Feature vector $x \rightarrow$ action/class $\alpha(x)$
-
Risk Function R : Expected loss of (after) making each decision
$R = \int R(\alpha_i|x) p(x)\ dx$ ,
where $R(\alpha_i|x) = \sum\limits_{j=1}\limits^{n} \lambda_{ij}\ P(w_j|x) \qquad$ and $\lambda$ is loss function
$\lambda(a_i|w_j) = \lambda_{ij}$ is cost of selecting class i when sample belongs to class j -
Goal of Bayesian decision theory: choose class i if : $\quad R(\alpha_j|x) \le R(\alpha_j|x) \qquad \forall j\ne i$
-
Note:
-
if data is Discrete Random variable, eg rolling fair die - 1,2,3,4,5,6
use Probablity Mass Function (PMF). -
if its Continuous Random Variable i.e. any value b/w range/interval
eg : exact weight of person, x in [0,180]
use Probablity Density Function (PDF) -
Class-Conditional Probablity $p(x|w)$ : The probablity of observing a certaain input feature $x$, given it belongs to specific class $w$
Bayes formula convert class prior $P(w_i)$ and class-conditional probablity $p(x|w_i)$ to posterior probablity for class $P(w_i|x)$.
-
Bayesial Classifier Decision
Discriminant Fn $g_i(x)$:
-
Helps classifier decide which class to assign to given input.
-
Example :
-
General Discriminant fn : $g_i(x) = -R(\alpha_i|x)$
-
Zero-One loss discriminant fn : $g_i(x) = P(w_i|x)$
-
-
Decision : Decide class 'i' if, $g_i(x) \ge g_j(x) \quad \forall i \ne j$
Equivalent Discriminants for Zero-One loss :
-
all classification errors are treated equally
-
$\lambda(\alpha_i | w_j) = \begin{cases} 0 & \text{if } i=j \ 1 & \text{if } i\ne j \end{cases}$
-
Decision : choose class that maximizes posterior probablity
Decision Region for Binary classifier : The boundary b/w regions where discriminant fn is equal for the 2 classes
Gaussian (Normal) Distribution
Plays major role in many bayesian classifier. Types are :
-
Univariate Normal Distribution models a single continuous variable (eg. height, temp)
-
Multivariate Normal Distribution models multiple features together.
Key variables : mean $\mu$, variance $\sigma^2$, covariance matrix $\Sigma$.
Maximum Likelihood Estimation (MLE)
-
MLW and MAP help infer most plausible params for models based on available evidence.
-
Goal : Choose model parameters that make observed data as likely as possible.
-
Likelihood fn $p(D|\theta)$ measures how likely observed data is for diff param vals.
-
Let dataset D contain n samples $p(D|\theta) = \prod\limits_{k=1}\limits^n p(x_k|\theta)$
having natural log for likelihood, called Log-Likelihood
$\ln(\theta) = \ln p(D|\theta) = \sum\limits_{k=1}\limits^n \ln p(x_k|\theta)$
$\frac{d}{d\theta} \ln (\theta) = \sum\limits_{k=1}\limits^n \frac{d}{d\theta} \ln p(x_k|\theta)$
set $\frac{d}{d\theta} \ln(\theta) = 0 $ and solve for params -
Below is comparision of MLE vs Bayesian Estimate
Max Likelihood Est (MLE) Bayesian Estimate Views the params as fixed but unknown vals Views params as random vars with some known prior distributions Best estimate is one that maximizes likelihood of data Update beliefs after observing data. -
As data grows, In Bayesian setting:
-
Prior influence decreases
-
Posterior influence increases around MLE solution
-
-
So Bayesian estimate and MLE converge to same sample in large dataset.
Maximum Posterior Estimation (MAP)
-
Goal : Maximizing posterior Probablity of prams in given observed data.
-
Combines MLE and Bayesian estimate.
-
If we assume uniform prior influence, MAP is same as MLE.
-
Usecases :
-
More Data (no strong Priors) -> MLE
-
Less Data (less strong priors) -> Bayesian or MAP
-
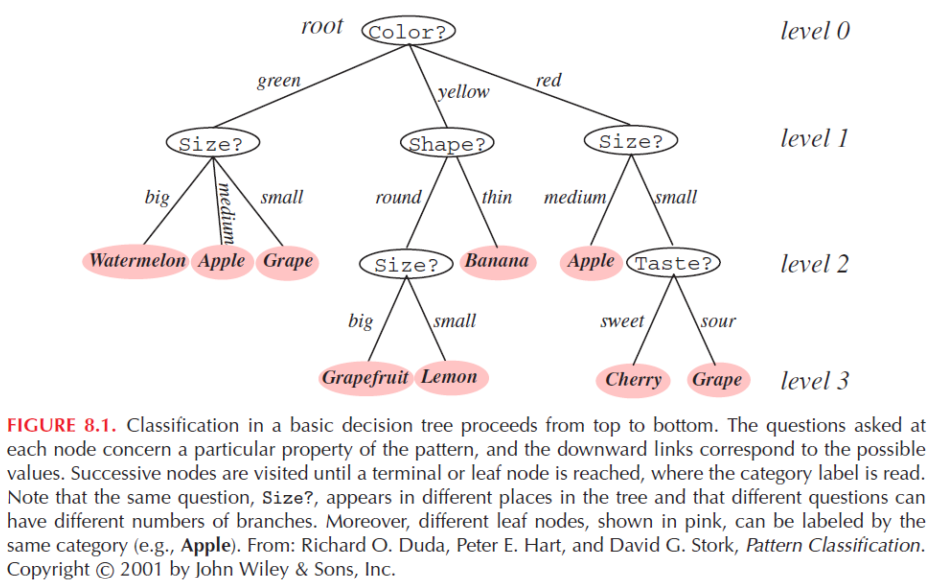
Decision Trees
-
Each internal node asks question about feature, each branch corresponds to possible answer & each leaf node is prediction.
-
Decision tree can represent any boolean functions
-
UseCase :
-
Model needs to be easy to interpret.
-
Can handle both categorical & numerical data
-
Naturally incorporate feature interactions.
-
-
Overfitting:
-
Caused when decision tree is Too Deep or Too Often Splits
-
Model learns more noise than actual data.
-
Leads to poor performance on unseen data.
-
-
Its very expensive with more nodes, Always try to make small tree.
-
Metrics for Splitting Criterion:
-
Info Gain : Choose Split that reduces uncertainty.
-
Accuracy BAsed : Choose split that gives highest accuracy for immediate classification
-
Gini Impurity : Fast calculation or less concern for interpretablity (popular for Real-time system or large scale classification)
-
Info Gain
Measures how much feature tells about class label:
$I(X,Y) = H(X) - H(X|Y) $ = $ H(Y) - H(Y|X)$
where,
Entropy for x: $H(X) = -\sum\limits_{i=1}\limits^n P(x=i) \log_2P(X=i)$
$H(X|Y=v) $ = $ -\sum\limits_{i=1}\limits^n P(x=i|Y=v) \log_2P(X=i|Y=v)$
$H(X|Y) = \sum\limits_{v\in Y} P(Y=v)* H(X|Y=v)$
Note : To prevent Overfitting -
-
Limit tree depth
-
set min no of samples req for splitting node.
-
use cross validation.
Steps to create Decision Tree :
-
Calc entropy for entire Dataset
$H(S) = -\sum\limits_{i=1}\limits^n P(S=y_i) \log_2P(S=y_i)$ -
Calc expected entropy after split for feature $X_i$
$\sum\limits_k \frac{|S_k|}{|S|}\ H(S_k)$ -
Calc Info Gain for feature $X_i$:
$I(S,X_i) = H(S) - \sum\limits_k \frac{|S_k|}{|S|}\ H(S_k)$ -
Split in descending order of Info Gain
Linear Regression
-
Supervised learning method where given (x1, y1), (x2, y2), .... (xn, yn), learn f(x) to predict y given x.
-
To fit a linear method, we use Least Squares Method : Minimize Cost (sum of squared errors)
-
Cost Fn : $J(\theta) = \frac{1}{2n} \sum\limits_{i=1}\limits^{n}(h_\theta(x^{(i)} - y^{(i)})^2 \qquad$ where hypothesis function $h_\theta = \sum\limits_{j=0}\limits^d \theta_j x_j$
-
$J(\theta)$ has convex shape, i.e. one global minimum. Any optimization algo we use, we get best fit.
-
We can use Search procedure to get parameters:
-
Initial guess
-
iteratively update to reduce cost
-
continue until convergence to best solution
-
Gradient Descent for Linear Regression:
-
Practical and efficient optimization algo for minimizing cost fn in linear regression problems.
-
Steps:
-
Initialize $\theta$.
-
compute $\frac{\partial}{\partial \theta_j} J(\theta)$
-
update j = 0, 1, ..... d
$\theta_j \leftarrow \theta_j - \alpha \frac{\partial}{\partial \theta_j} J(\theta)$
$\alpha$ = learning rate (small), eg 0.05
-
-
if learning rate is too small => slow learning; if too large => could overshoot or diverge.
-
experiment with different learning rates or use adaptive learning rates such as momentum or Adam.
Closed Form Solution:
-
Way to calculate optimal param directly without iteration (using matrix multiplication).
-
Allows to calc optimal rate in one step, much faster and more precise for small dataset
-
Instead of calculating loss in each iteration, we vectorize it
$J(w) = \frac{1}{2n} ||X_W - y||^2$
$\qquad = \frac{1}{2n} (X_W - y)^T(X_W - y)\ $ $ \propto $ $ w^TX^TX_W - 2w^TX^Ty + y^Ty$
taking gradient and solving = 0
$(X^TX)w - X^Ty = 0$
$w = (X^TX)^{-1}X^Ty$ closed form solution
| Closed Form Solution | Gradient Descent |
|---|---|
| Non-iterative | Requires multiple iteration |
| No need of learning rate | Need to choose right learning rate |
| Can be expensive for large n | Works well for large n |
NOTE => Standardize the features, ensure that features have similar scales. Transform them to have mean 0 and variance 1:
$\qquad x_j^{(i)} \leftarrow \frac{x_j^{(i)}-\mu_j}{s_j}, \qquad j=1,2,.... d$, where $\mu_j$ = feature mean, $s_j$ = feature standared deviation (or range)
Logistic Regression
-
Estimates probablities using logistic function. Classification with probablitistic framework.
-
Its a classification algorithm, despite its name.
-
it gives probablity that an input belongs to particular class (0 or 1) - learn p(wi | x)
-
$h_\theta(x)$ should give $p(y=1 | x;\ \theta)$
-
Log-Odds (Logits) modeled as linear fn of input features
$\qquad log \frac{p(y=1 |x;\ \theta)}{p(y=0 |x;\ \theta)} = \theta_0+\theta_1 x_1 + .... + \theta_d x_d$ -
We Use theshold for prediction:
-
predict 1 if $h_\theta(x) \ge 0.5$
-
predict 0 if $h_\theta(x) \le 0.5$
-
-
Logistic Sigmoid Function :
-
$g(z) = 1/(1+e^{-z})$
-
Smooth and differentiable for convenient optimization
-
use $h_\theta(x) = g(\theta^Tx)$ to produce probablities
-
-
We cannot use squared loss in logistic regression as it would lead to non convex optimization because $h_\theta(x) = 1/(1+e^{-\theta^Tx})$
-
Instead we use log-loss or cross-entropy loss or negative log-likelihood:
$J(\theta) = -\sum\limits_{i=1}\limits^n\ [\ y^{(i)} \log h_\theta (x^{(i)}) $ + $ (1-y^{(i)}) \log (1-h_\theta(x^{(i)}))\ ]$ -
We use gradient descent to update the params to reduce cost.
Alternate way is to use MLE (Max likelihood estimation) . -
We use log of probablities because log likelihood fn :
-
ensures numerical stability
-
magnifies penalty for confident wrong answer
-
turns product to sum for easier calculation.
-
has desireable convexity properties.
-
-
Regularization is added to prevent overfittin due to noise and irrelavant features, this is needed especially for high dimension data.
-
L2 (Ridge): $J_{regularized} (\theta) = J(\theta) + \frac{\lambda}{2}\sum_{j=1}^d \theta^2_j$
-
L1 (Lasso): $J_{regularized} (\theta) = J(\theta) + \frac{\lambda}{2}|| \theta_{[1:d]}||^2_2$
-
-
Advantages :
-
simple and interpretable
-
good when inputs and log-odds of output have roughly linear relationship
-
-
Challenges:
-
Struggles with complex, non-linear patterns
-
May not acheive hgh accuracy if classes arent linearly seperable.
-
Gradient Descent for Logistic Regression
-
minimize negative log-likelihood (cross-entropy loss)
$J(\theta) = -\sum\limits_{i=1}\limits^n\ [\ y^{(i)} \log h_\theta (x^{(i)})$ + $(1-y^{(i)}) \log (1-h_\theta(x^{(i)}))\ ]$ -
This cost fn is convex, gradient descent will converge to global min with appropriate learning rate
-
Steps:
-
Initialize $\theta$
-
Repeate until convergence
$\theta_0 \leftarrow \theta_0 - \alpha \sum\limits_{i=1}\limits^n (h_\theta(x^{(i)}) - y^{(i)})$
$\theta_j \leftarrow \theta_j - \alpha [\ \sum\limits_{i=1}\limits^n (h_\theta(x^{(i)}) - y^{(i)}) x_j^{(i)} + \lambda\theta_j\ ]$
$\theta_j \leftarrow \theta_j - \alpha \frac{\partial}{\partial \theta_j} J(\theta)$
-
-
Challenges with Gradient Descent:
-
Needs right learning rate, too large => diverge, too small => slow convergence
-
Can be overcome with adaptive learning rate such as AdaGrad (Adaptive Gradient)
-
adjusts learning rate for each param as per frequency and magnitude of its updates
-
frequently updated params receive smaller steps, infrequently get larger steps.
-
especially useful for sparse data such as NLP and click-stream analysis
-
it is foundation for RMSprop and ADAM.
-
-
-
Optimization methods:
-
Stochastic Gradient Descent (SGD) : update wts using one sample at a time; added noise (less stable) but faster convergence.
-
Mini-Batch Gradient Descent : data split in batches, update wts using each batch; balances efficiency and stability
-
Using adaptive learning rate or prior updates : Momentum, RMSprop, Adam
-
Multi-Class Classification
Logistic regression is naturally binary, we have to make them adapt for multi class classification such as :
-
One-Versus-Rest (OvR)
-
find K-1 classifiers f1, f2, ..... f_(k-1)
-
f1 classifies 1 vs {2, 3, .... K}
-
f2 classifes 2 vs {1, 3, 4, ..... K}, so on and so forth till f_k-1
-
-
Pick classifier with highest probablity score.
-
Advantage : Good if classes are imbalanced
-
Disadvantage : Can be sensitive to dominant classes.
-
-
One-Versus-One
-
find K(K-1)/2 classifiers f(1,2), f(1,3), ...., f(K-1, K)
-
f(1,2) classifies 1 vs 2
-
f(1,3) classifies 1 vs 3, so on and so forth
-
-
Each class is assigned binary code, chose class whose code is close to predicted bits
-
Advantage : Robust to errors and allows flexibility (powerfull for ensemble methods)
-
Disadvantage : Computationally expensive
-
-
Multinomial Logistic Regression (Softmax):
-
For C classes {1, 2, ... C}:
-
Softmax function : $p(y=c|x: \theta_1.....\theta_C) $ = $\frac{exp(\theta_c^Tx)}{\sum_{j=1}^C exp(\theta_j^Tx)} $
-
Better because it offers joint probability modeling, better scalability, and cleaner decision boundaries.
-
instead of modelling the log odds for a single class, we now compute the score for each class using a linear fn, exponentiate the scores and normalize using a softmax fn, this yields interpretable probablities for each class and let us optimize across entropy loss fn across all classes simultaneously.
-
Evaluate Performance
| Classification | Regression |
|---|---|
| Accuracy : Proportion of correct predictions out of all. (TP+TN)/(total) Use when classes are balanced |
Mean Square Error (penalize large error) |
| Precision : Proportion of positive predictions that were correct. True positives / Predicted Positives = TP/(TP+FP) Use when FP are costly (eg. spam detection) |
MAE(all deviation treated equally) |
| Recall : Proportion of actual positives that wer correctly predicted. TP/(TP+FN) Use when missing positives is risky (eg. cancer screening) |
R-Squared Score (measures how much of variablility is explained by the model) |
| F1 score: Harmonic mean of precision & recall, balancing both. (2*Precision*Recall) / (Precision+Recall) Use when we want middleground b/w avoiding FP and FN |
ROC Curve is a plot of the TP rate against the FP rate. It shows the tradeoff between sensitivity and specificity.
Confusion Matrix
| Actual \ Predicted | Yes | No |
|---|---|---|
| Yes | TP | FN |
| No | FP | TN |
Evaluate Comparision between 2 models
K-fold cross-validation
-
Steps:
-
Divide full dataset into k parts.
-
Repeat k times : Train on k-1 sets and test on 1 set.
-
Result is average of k tests.
-
-
Multiple trials of k-fold CV :
-
Shuffle data
-
perform k-fold CV.
-
Loop 1 & 2 for "t" times.
-
Compute stats over t x k performances of each partition for both models
-
-
The below tests can be done with k-folds :
-
Paired t-Test : Compare performance of 2 models across same folds.
$t = \frac{\mu}{\sigma / \sqrt{n}} \qquad where\ \mu=\frac{\sum d_i}{n},\quad \sigma = \sqrt \frac{\sum(d_i- \mu)^2}{n-1}$ di is difference b\w performance at i'th fold
degrees of freedom = n-1
find p value from t and degrees of freedom
reject null hypo if p<0.05 -
Wilcoxon Signed-Rank Test : Non parametric alternative to paired t-Test, rank absolute difference in performance per fold.
-
McNemar's Test : Not used directly with k-fold CV.
-
-
These tests help Calculate p-val, the likelihood of observed difference occuring by chance.
-
p-val is probability of observing your data (or something more extreme) assuming the null hypothesis is true.
It helps you decide whether to reject the null hypothesis. -
Smaller p-value => stronger evidence against the null.
Hypothesis Testing
-
Define null and alt hypothesis:
-
Null hypo (H0) : theres no diff b/w models.
- Defines a distribution P(m|H0) over some stat
-
Alt hypo (H): one model performs better than other.
-
-
Reject H0 if p-val P(m|H0) <= S, where S is predetermined significance val (usually 0.05) and m is test statistic from data based on type of test.
Support Vector Machines (SVM)
-
Supervised Learning model used primarily for classification models.
-
It tries to find best seperating hyperplane to divide input into 2 classes by maximizing margin (dist b/w seperating hyperplane and nearest training example).
-
Doesnt just seperate data into 2 classes, but seperates with widest possiblebuffer zone. This helps generalize well
-
This makes model robust to small part durations in data and helps reduce overfitting.
-
For noise in data, perfect seperation may not be possible (can have mislabeled or overlapping pts), SVM's use soft margin to deal with it.
-
Soft margin balance b/w margin and maximization and classification accuracy.
-
Rather than forcing every pt to be correctly classified, they allow for some violation (slack variables).
-
SVM shine in noisy high dimension spaces, they find robust decision boundaries.
-
-
SVM : $min_\theta\ C \sum\limits_{i=1}^n [y_i\ cost_1(\theta^Tx_i)\ +$ $ (1-y_y)\ cost_0(\theta^Tx_i)] - \frac{1}{2}\sum\limits_{j=1}^d \theta^2_j$ the last part is of regularization
C balances margin maximization with error penalties. its conceptually similar to inverse of regularization in logistic regression $C\sim 1/\lambda$ -
High C => Penalizes misclassification heavily, lower C => allows more slack variables.
Adjust C to tune tolerance to noise. -
Dual form of SVM : Maximize $J(\alpha) = \sum\limits_{i=1}^n \alpha_i - \frac{1}{2} \sum\limits_{i=1}^n\sum\limits_{j=1}^n \alpha_i \alpha_j y_i y_j
$\sum_i\alpha_i y_i = 0$ balances wt of contraints for diff classes and \<xi, xj> measures similarity b/w pts
xi and xj represents features of data, \<xi, xj> is dot product of feature vectors is similarity of xi and xj (how closely they are in feature space)-
each training pt gets a rate called alpha which reflects how imp pt is.
-
$\alpha_i > 0$ : point is support vector
-
$\alpha_i = 0$ : point is not a support vector
-
-
$J(\alpha)$ signifies the objective function in the dual form of SVM. By finding the maximum value of this function, you determine the best boundary that separates different classes in your data.
-
-
Decision Fn : $h(x) = sign(\sum_{i\in SV} \alpha_i y_i
where $b=\frac{1}{|SV|} \sum_{i\in SV} (y_i - \sum_{j \in SV} \alpha_j y_j
this is just like h(x) = wx+b
Kernels in SVM
-
Kernels allow SVM to create flexible, non linear decision boundaries without directly transforming input data to higher dimension.
-
Manully mapping input data to higher dimension is computationally expensive, Kernel lets us compute dot product of high dimensional space without actually mapping the data.
-
Technique of replacing dot product with kernel fns is known as kernel trick, by using it we train a linear classifer in an invisible high dimensional space while only doing calculations in original input space.
$J(\alpha) = \sum\limits_{i=1}^n \alpha_i - \frac{1}{2} \sum\limits_{i=1}^n\sum\limits_{j=1}^n \alpha_i \alpha_j y_i y_j\ K(x_i, x_j)$ -
Polynomial Kernel
-
Calculates similarity based on powers of dot products.
-
for degree 2, $xi = [x{i1}, x_{i2}]$ and $xj = [x_{j1}, x_{j2}]$
$K(x_i, x_j)$ = $
$ K(xi, xj) = -
Lets us model curved boundaries and interactions b/w features without expanding original data manually.
-
-
Gaussian Kernel (Radial Basis Fn RBF Kernel)
-
$K(x_i, x_j) = exp(-\frac{||x_i - x_j||^2_2}{2\sigma^2})$
-
has val 1 when xi = xj, requiries feature scaling before use
-
it not only considers similarity b/w 2 pts but also how close they are in feature space.
-
Creates smooth flexible decision boundaries & works well with high dimensional or messy data
-
Key parameter $\gamma = 1/(2\sigma^2)$ controls how far influence of each training pt reaches
-
high gamma => over sensitive model and overfitting
-
low gamma => too smooth and underfits
-
-
-
Other kernals are :
-
Sigmoid Kernel :
$K(x_i, y_j) = tanh(\alpha x_i^T x_j + c)$ -
Cosine similarity Kernel :
$K(x_i, x_j) = \frac{x_i^T x_j}{||x_i||\ ||x_j||}$ -
Chi-Squared Kernel :
$K(x_i, x_j) = exp(-\gamma \sum\limits_k \frac{(x_{ik}-x_{jk})^2}{x_{ik}+x_{jk}})$ -
String Kernels
-
Tree Kernels
-
Graph Kernels
-
-
Choosing right kernel:
-
Clean data & polynomial relationship => Polynomial Kernel
-
Messy or high dimensional data => Gaussian Kernel
-
-
To Use SVM : Choose Right kernel and its parameter (degree d for polynomial or gamma for RBF).
-
Can use cross validation to select best hyperparameters
-
Theres tradeoff b/w model complexity and training time
- more flexible kernels and larger data set can increase computation and risk of overfitting.
-
K-Nearest neighbour
-
Its an instance based learning (memory-based learning), where we simply store training data instead of learning an implicit model, to predict we look the stored instances and predicts based on closest instance.
-
1-NN
-
classify point by looking at single closest pt in dataset.
-
forms voronoi tesselation of instance space, ie each region around data pt is classified according to its nearest instance.
-
-
Distance Metrics used :
-
Euclidean Dist (a,b) = $\sqrt{(a_1-b_1)^2 + (a_2-b_2)^2}$
-
Manhattan Dist (a,b) = $\sum\limits_{i=1}^n |a_i - b_i|$
-
Minkowski Dist (a,b) = $p\sqrt{\sum\limits{i=1}^n |a_i-b_i|^p}$
-
Cosine Similarity (a,b) = $\frac{a \cdot b}{||a|| ||b||}$
-
Makes a lot of difference to choose metric especially when features are on diff scales or hve diff meanings
-
-
K-NN : Generalization of 1-NN, new pt assigned most frequent label of its k nearest neighbour
-
A vote is done among the k neighbours
Principal Component Analysis (PCA)
-
Mathematical technique to find new set of axes (principal components), linear combinations of orig features.
-
Principal component 1 - Direction of greatest variance
-
Subsequent principal components - orthogonal (perpendicular) to prev ones, capturing nxt largest variance
-
-
Its finding best way to rotate and project data onto a lower dimension subspace while keeping as much variablity and info as possible.
-
Dimensionality reduction is about simplifying data, ignore components of lesser importance i.e. those that dont explain much variance.
-
Only top k principal components are chosen, we reduce no of features to analyze making subsequent learning tasks more efficient & accurate.
-
Essential in img processing, genomics and text analytics, where multiple features and much of data's action happens in smaller space.
-
Steps :
-
Standardize data and store in matrix B
-
Compute covariance matrix $\sum$
-
compute eigenVectors A and eigen Values Q
-
Sort by descending eigenvalues and select the top k eigenvectors (principal components).
-
Project data pts : $T = B\cdot A_{1:k}$
Each data gets new set of coordinates in reduced space
-
-
Used for visualization, noise reduction, data compression, face recognition (eigenfaces), and in genetics, finance, marketing analytics and img processing.
-
Application in Facial Recognition :
-
represent faces as eigenfaces (combination of "Standardized face ingredients").
-
each face is expressed as weighted sum of eighen faces
-
To recognise, face coefficients are calculated in eigenface space.
-
Use nearest neighbour classifier to compare coeff to stored avgs of each person
-
After a threshold, adding more data doesnt help much
-
-
Application in img compression:
-
divide img to smaller patches, each is treated as data vector in high dimensional space
-
Apply PCA and represesnt in top principal components
-
-
similarly noise can be removed as it has less significance